실습 결과 공유하기
실습 결과 공유하기
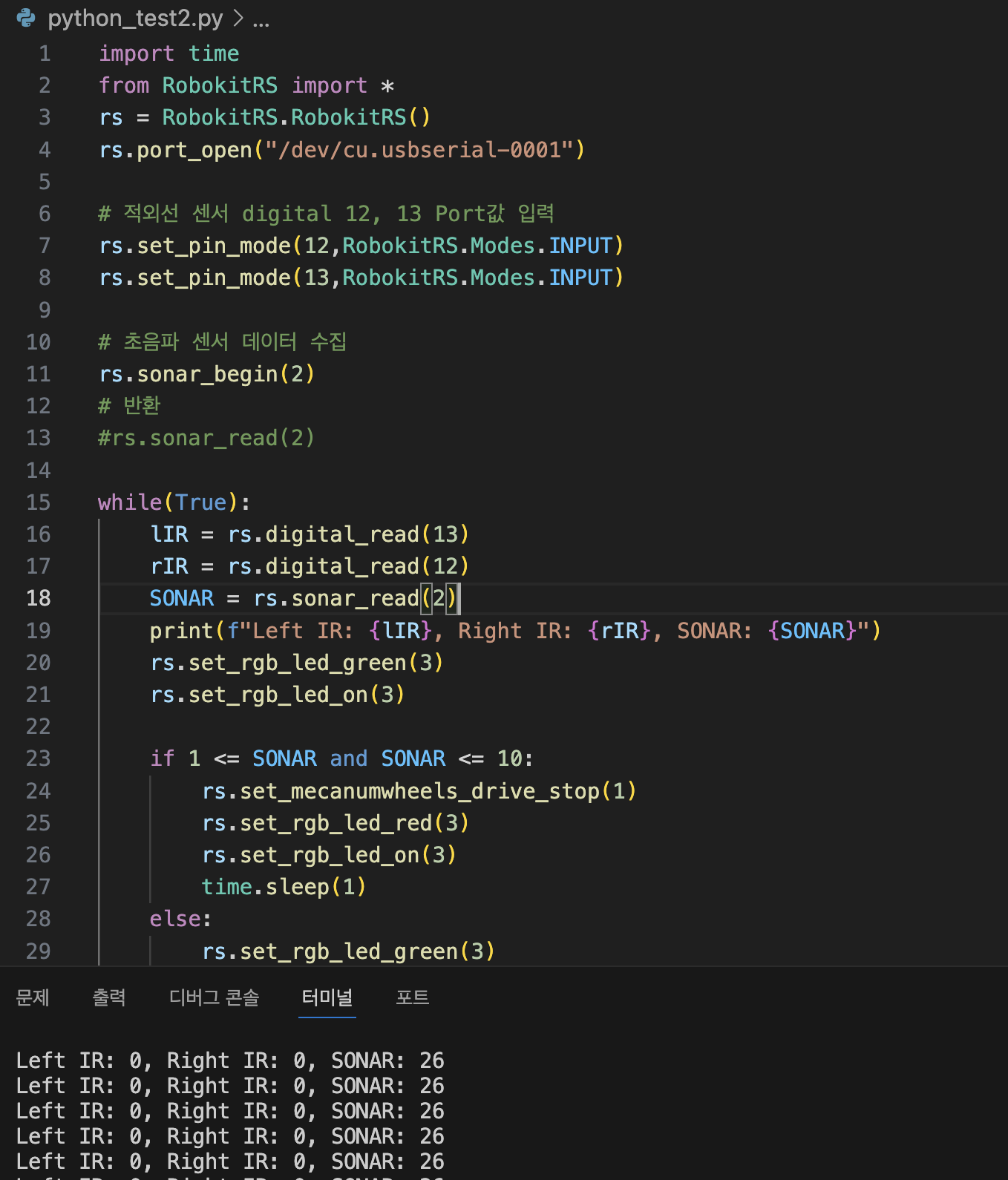
나의 파이선 코드- 라인따라 자율 주행 정지선 만나면 정지. 전방 10cm 앞에 장애물 나타나면 정지했다. 장애물 사라지면 다시 주행.. 주행등 초록, 정지등 빨강 코딩으로 손쉬운 AI자율주행차 만들기
ho****0|
62|
2025.08.05
- 이전글챗gpt 활용해 ai기획전문가 되기
- 다음글맥버전으로 블럭코딩 완성 - 로봇 팔 움직이기
오... 코드를 작성해서 차를 움직이는 거군요. 초음파 센서도 있고 아주 흥미로운데요
다른사람이 하는 코딩은 멋있어 보이는데, 정작...ㅎㅎㅎ 멋저요!
열심히 코드 작성한 그대로 움직이면 기분이 너무 좋을 것 같아요!
아 동영상으로 구동되는걸 볼 수 있으면 더 좋았을텐데 아쉽네요 ㅠㅠ